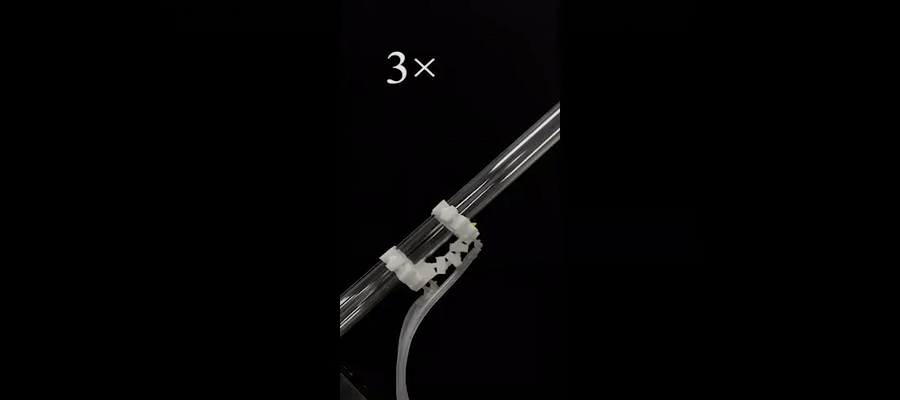
Um aparelho ágil similar a uma minhoca agarra firmemente em um tubo circular e se locomove através de movimentos de contração e retração. Este ágil equipamento é um robô flexível/macio que foi impresso diretamente por uma impressora 3D usando um novo módulo acionador flexível desenvolvido pela Universidade Tianjin.
Nos últimos anos, os robôs macios têm recebido uma ampla e contínua atenção devido às suas vantagens como maior flexibilidade e segurança para o corpo humano. Enquanto a vantagem da impressão 3D é a fabricação de formas e estruturas complexas, tendo nenhum processamento subsequente, finalizando a construção em uma só vez.
As impressões de estruturas integradas (sem necessidade de montagem posterior) é uma das aplicações mais típicas da tecnologia de impressão 3D para a fabricação de robôs macios nos últimos anos.
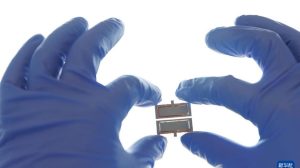
(Peça experimental macio criado pela Universidade Tianjin)
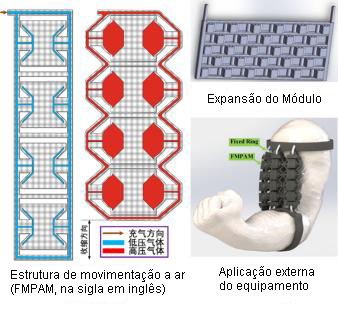
Recentemente, o grupo de Siyang Zuo e Jianbin Liu da Universidade Tianjin propôs um novo método de acionamento modular flexível baseado em cilindros de filme fino e o aplicou a músculos artificiais e robôs rastejantes para tubos, podendo alterar a combinação do equipamento de acordo com diferentes tipos cenários de aplicação. O robô macio é movido a ar com válvulas de saída de ar para proporcionar energia de locomoção.
O método baseado na tecnologia de fabricação em impressora 3D, possibilita a eliminação dos processos tradicionais de fabricação e montagem, reduzindo significativamente o custo e ciclo de fabricação, tendo vantagens em baixo consumo de ar, alta resposta dinâmica, alta confiabilidade e forte adaptabilidade a cenários de aplicação.
Os resultados foram publicados no “IEEE Robotics and Automation Letters” no início de janeiro de 2021.
Um novo conceito de design de músculo artificial movido a ar e seus cenários de aplicação
“Cada cilindro de filme é como um pequeno músculo no corpo humano, ou um ‘nó’ em um réptil, porém é feito de poliuretano termoplástico”, disse Liu Jianbin, explicando que esta nova estrutura de cilindro de filme foi uma ideia criativa da equipe.
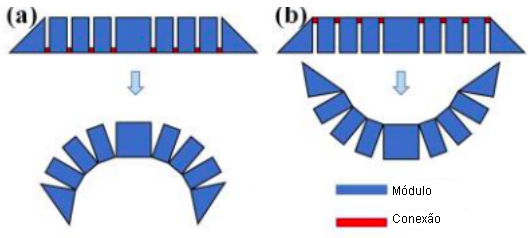
Se compararmos esse equipamento com uma unidade muscular básica, então de acordo com os diferentes requisitos de aplicação (mãos, braços, órgãos etc.), elas podem conectar em uma ordem e layout diferentes para formar um músculo inteiro, em seguida aplicar esse músculo artificial que está adaptado a diferentes cenários de uso, e todo o processo de fabricação “muscular” é feita com a tecnologia de impressão 3D.
(Imagem de ilustração da peça)
Conceito de design de um robô de rastejamento em tubos movido a ar
Além disso, a equipe da Universidade de Tianjin propôs um novo robô de rastejamento de tubos que pode ser aplicado à inspeção e monitoramento em tempo real das instalações de dutos industriais. O robô que rasteja na tubulação adota uma geometria biônica que pode operar na parede interna e externa da tubulação.
A movimentação flexível permite que o robô se adapte a uma ampla gama de diâmetros de tubos e possa lidar com aplicações de tubos retos, curvos, verticais, horizontais e angulares, o robô pode suportar cargas de mais de 80 vezes do seu próprio peso.
Fonte: People’s Daily