
Uma equipe de pesquisa da Universidade Beihang desenvolveu recentemente uma nova tecnologia de detecção tátil que permite que robôs tenham uma sensação de toque semelhante à humana, conseguindo sentir a textura da superfície, tal como sua dureza.
Essa tecnologia pode ser aplicada a robôs de materiais moles para auxiliar na fabricação e próteses biônicas e robôs humanoides.
A equipe de pesquisa conduziu uma série de testes no sistema de protótipo que criaram para avaliar sua tecnologia de detecção tátil, e o resultado mostra que o sistema alcançou 100% e 99,7% de precisão na textura do objeto e reconhecimento de rigidez, respectivamente.
Inspiração em humanos e mamíferos
Nos últimos anos, muitos especialistas em robótica ao redor do mundo tentaram desenvolver um sistema robótico que pode replicar o toque humano. Ao mesmo tempo, eles também estão tentando substituir estruturas rígidas por materiais macios para criar membros biônicos mais realistas e avançados e robôs humanoides.
A equipe de pesquisa da Universidade Beihang se inspirou na estrutura de propriocepção encontrada em humanos e mamíferos, desenvolveu uma nova tecnologia de detecção tátil que permite que a mão robótica macia tenha o sentido do toque e possa perceber a textura e rigidez dos objetos.
Precisão chega a 100%
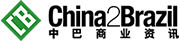
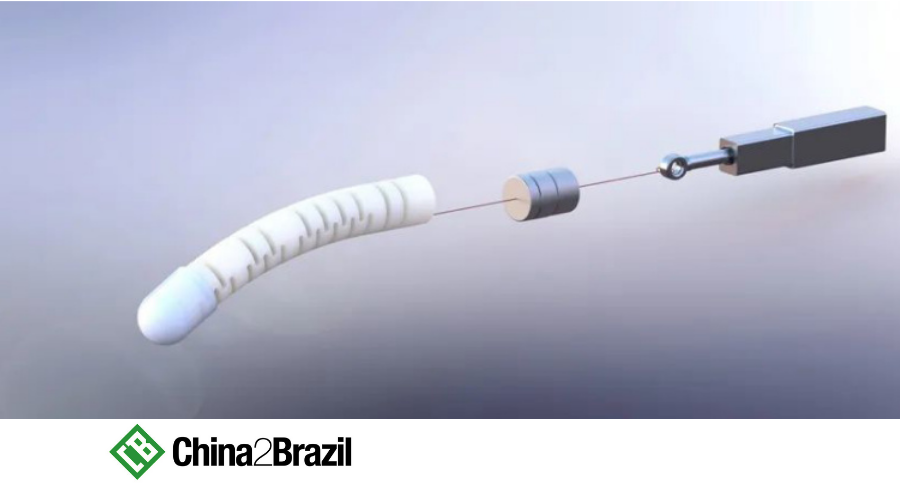
O sistema de protótipo de mão robótica criado pela equipe de pesquisa de Beihang é composto por um atuador linear, um “tendão”, um sensor de tensão e um dedo robótico macio, e uma capa feita de poliuretano é colocada na ponta do dedo a fim de imitar a ponta de um dedo humano.
O tendão do dedo robótico é conectado ao atuador e o sensor de tensão é instalado no meio do tendão. Quando o atuador é acionado, ele puxa o tendão para dobrar ou endireitar o dedo, e a tensão no tendão muda de acordo. Quando um dedo toca um objeto diferente, o sensor emite uma série de sinais de tensão para caracterizar o objeto tocado.
O pesquisador usou 8 placas de textura diferentes e 4 cilindros de rigidez diferentes para testar o dedo do robô. Foi realizado testes de detecção tátil e detecção de rigidez, onde teve 100% e 99,7% de precisão nos resultados, respectivamente.
Fonte: IT Home


